个人简介
近五年,在本领域权威期刊上共发表论文14篇,其中,作为第一作者或通讯者发表论文10篇,授权专利5项,其中国内发明专利4项,美国发明专利1项。参与国家自然基金面上项目、国网科技项目、航天科技基金等。主要研究方向:无人系统多模态感知;无人机自主导航定位与建图;具身智能机器人;深度学习、大模型驱动的目标检测等。每年硕士名额1-2名,欢迎同学报考。

无人机硬件平台
个人资料
- 出生年月: 1998-07-12 00:00:00.0
- 学历: 博士研究生毕业
- 毕业院校: 东南大学
教育经历
-
2020.9-2025.6,东南大学,仪器科学与技术,工学博士
工作经历
-
2025.6-至今,河海大学人工智能与自动化学院,讲师
研究领域
研究方向:无人系统多模态感知、退化环境多传感器SLAM、组合导航定位、 具身智能、深度学习目标检测、AI+自主机器人 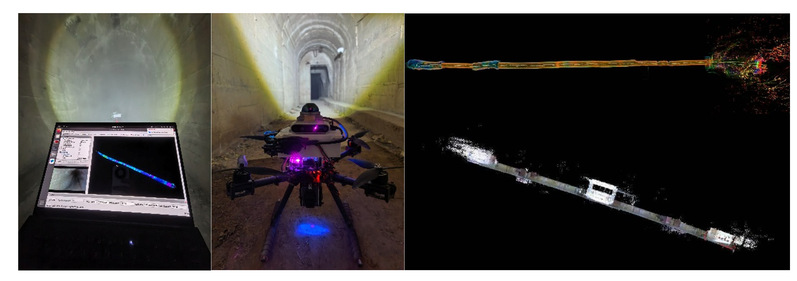
330轴距无人机长走廊长隧道定位轨迹与3D建图 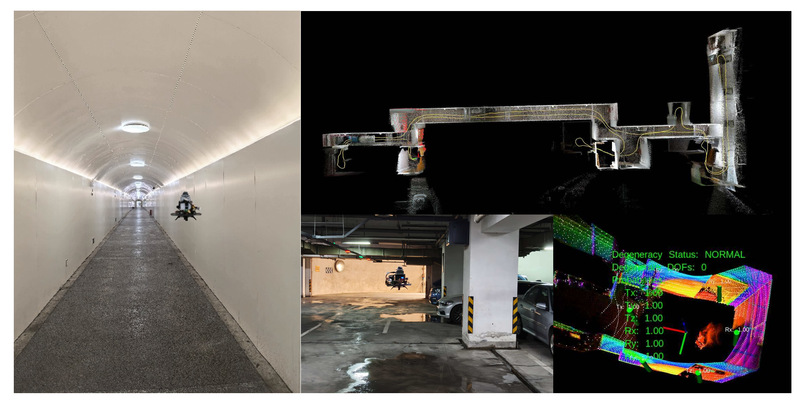
150轴距无人机地下车库、长隧道定位轨迹与3D建图


无人机硬件结构
科研项目
-
1、无人机地下空间多模态定位与建图方法研究,2025.01.01 00:00:00+00-2026.12.01 00:00:00+00,刘丰宇,人工智能与自动化学院党委、人工智能与自动化学院
-
2、非结构化环境下可观测性驱动的水下多模态导航技术研究,2026.01.01 00:00:00+00-2027.12.01 00:00:00+00,潘绍华,人工智能与自动化学院党委、人工智能与自动化学院
论文
-
1、Confidence Factor Based Robust Localization Algorithm with Visual-Inertial-LiDAR Fusion in Underground Space,IEEE Transactions on Circuits and Systems for Video Technology,SCI,2025,Fengyu Liu
-
2、Transformer-Based Local-to-Global LiDAR-Camera Targetless Calibration with Multiple Constraints,IEEE Transactions on Instrumentation and Measurement,SCI,2024,Fengyu Liu
-
3、 A visual SLAM method assisted by IMU and deep learning in indoor dynamic blurred scenes,Measurement Science and Technology,SCI,2023,Fengyu Liu
-
4、Spatial feature recognition and layout method based on improved CenterNet and LSTM frameworks,ETRI Journal,SCI,2025,Fengyu Liu
-
5、Combination of iterated cubature Kalman filter and neural networks for GPS/INS during GPS outages,Review of Scientific Instruments,SCI,2019,Fengyu Liu
-
6、基于深度学习与特征点速度约束的室内动态SLAM方法,中国惯性技术学报,EI,2023,刘丰宇
-
7、A spatial layout method based on feature encoding and GA-BiLSTM,2023 International Conference on Robotics, Control and Vision Engineering,EI,2023,Fengyu Liu
-
8、基于惯性/仿生视觉/激光雷达的智能感知无人系统,飞控与探测,中文核心,2024,刘丰宇
-
9、基于温度补偿的野外无人机视觉/惯性鲁棒定位方法,海军航空工程大学学报,中文核心,2025,刘丰宇
科技成果
-
1、基于目标检测和特征点速度约束的动态视觉SLAM方法,CN202211037460.2,发明专利,授权
-
2、仿生视觉多源信息智能感知无人平台,CN202211481989.3,发明专利,授权
-
3、基于置信因子的无人机地下空间多模态鲁棒定位方法,CN202411810800.X,发明专利,授权
-
4、基于Transformer的特征级相机-激光雷达在线标定方法,CN202410513954.6,发明专利,授权
-
5、UNMANNED PLATFORM WITH BIONIC VISUAL MULTI-SOURCE INFORMATION AND INTELLIGENT PERCEPTION,US20240184309,US Patent,授权
社会职务
中国惯性技术学会会员 南京计量测试学会会员 中国仪器仪表学会会员 IEEE TIM、MST等国内外高水平期刊审稿人
招生信息
研究生招生(每年硕士名额1-2名) 欢迎对以下研究方向感兴趣的同学报考研究生: 1.旋翼无人机与无人系统 2.自主机器人与智能决策 3.深度学习目标检测与多模态感知 4.具身智能机器人 5.三维重建与环境感知 6.多源信息融合与组合导航定位 课题组聚焦复杂环境(如地下空间、弱光及GNSS受限场景)中的智能感知与自主系统研究,涵盖算法设计、系统实现与实际应用验证。 本科生培养 欢迎具有良好动手能力和科研兴趣、想保研的本科生加入课题组,参与: 1.大学生创新创业项目 2.各类学科竞赛(机器人、无人机、AI等) 3.科研项目与工程实践 课题组可提供: 1.硬件平台、试验条件 2.论文与专利发表机会
|
